Home
Thank you for your visit.
I am Letian Wang, a visiting student researcher at the MSC Lab at the University of California, Berkeley, supervised by Prof. Masayoshi Tomizuka. I finished my bachelor's degree and am in a master's program at Beihang University, Beijing, China.
My research interest includes machine learning, optimization, control theory approaches and their applications to motion planning, behavior prediction, and decision making for autonomous vehicles and robotics.
I was also a research assistant at the Robotics Institute of Hong Kong University from August 2018 to October 2018. Under the supervision of Prof. Zexiang Li, I worked on strategies and algorithms of motion planning and trajectory tracking for Tailsitter VTOL UAV.
Home
Thank you for your visit.
I am Letian Wang, a visiting student researcher at the MSC Lab at the University of California, Berkeley, supervised by Prof. Masayoshi Tomizuka. I finished my bachelor's degree and am in a master's program at Beihang University, Beijing, China.
My research interest includes machine learning, optimization, control theory approaches and their applications to motion planning, behavior prediction, and decision making for autonomous vehicles and robotics.
I was also a research assistant at the Robotics Institute of Hong Kong University from August 2018 to October 2018. Under the supervision of Prof. Zexiang Li, I worked on strategies and algorithms of motion planning and trajectory tracking for Tailsitter VTOL UAV.
Publication
-
Transferable and Adaptable Driving Behavior Prediction with Hierarchical Semantic Graph Neural Networks
The International Journal of Robotics Research (IJRR) (Under Review)
Letian Wang, Yeping Hu,Liting Sun, Wei Zhan, Masayoshi Tomizuka, Changliu Liu
-
Online Adaptation of Neural Network Models by Modified Extended Kalman Filter for Customizable and Transferable Driving Behavior Prediction
The AAAI Conference on Artificial Intelligence – Workshop on Human-Centric Self-Supervised Learning (Under Review)
Letian Wang, Yeping Hu, Changliu Liu
-
Hierarchical Adaptable and Transferable Networks (HATN) for Driving Behavior Prediction
Advances in Neural Information Processing Systems (NeurIPS 2021) Machine Learning for Autonomous Driving Workshop
Letian Wang, Yeping Hu,Liting Sun, Wei Zhan, Masayoshi Tomizuka, Changliu Liu
Abstract:
When autonomous vehicles still struggle to solve challenging situations during on-road driving, humans have long mastered the essence of driving with efficient transferable and adaptable driving capability. By mimicking humans' cognition model and semantic understanding during driving, we present HATN, a hierarchical framework to generate high-quality driving behaviors in multi-agent dense-traffic environments. Our method hierarchically consists of a high-level intention identification and low-level action generation policy. With the semantic sub-task definition and generic state representation, the hierarchical framework is transferable across different driving scenarios. Besides, our model is also able to capture variations of driving behaviors among individuals and scenarios by an online adaptation module. We demonstrate our algorithms in the task of trajectory prediction for real traffic data at intersections and roundabouts, where we conducted extensive studies of the proposed method and demonstrated how our method outperformed other methods in terms of prediction accuracy and transferability.


-
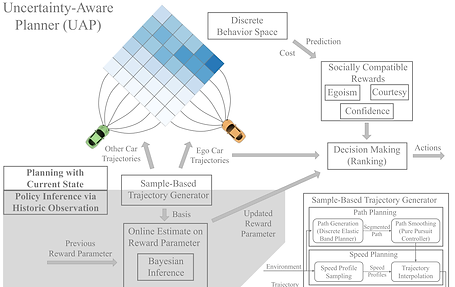
Socially-Compatible Behavior Design of Autonomous Vehicles with Verification on Real Human Data
IEEE Robotics and Automation Letters(RA-L) and ICRA 2021
Letian Wang, Liting Sun, Masayoshi Tomizuka, Wei Zhan
Abstract:
As more and more autonomous vehicles (AVs) are being deployed on public roads, designing socially compatible behaviors for them is becoming increasingly important. In order to generate safe and efficient actions, AVs need to not only predict the future behaviors of other traffic participants, but also be aware of the uncertainties associated with such behavior prediction. In this paper, we propose an uncertain-aware integrated prediction and planning (UAPP) framework. It allows the AVs to infer the characteristics of other road users online and generate behaviors optimizing not only their own rewards, but also their courtesy to others, and their confidence regarding the prediction uncertainties. We first propose the definitions for courtesy and confidence. Based on that, their influences on the behaviors of AVs in interactive driving scenarios are explored. Moreover, we evaluate the proposed algorithm on naturalistic human driving data by comparing the generated behavior against ground truth. Results show that the online inference can significantly improve the human-likeness of the generated behaviors. Furthermore, we find that human drivers show great courtesy to others, even for those without right-of-way. We also find that such driving preferences vary significantly in different cultures.

Project


-
Unified Motion Primitives and Control Strategy for Tailsitter UAVs in All Flight Modes: Hover, Transition, and Level Flight
Hong Kong University of Science and Technology, Hong Kong, China (July 2018 – October 2018)
Supervisor: Prof. Zexiang Li and Prof. Fu Zhang
Abstract:
The precision and speed are both deterministic factors for high-quality motion planning algorithms, especially for the VTOL (Vertical Take-off and Landing) UAV with high-nonlinear dynamics. We developed a systematic motion planning approach for fast autonomous flights based on the motion primitives. This planner can optimally generate high-quality trajectories within a few milliseconds and make full use of aerodynamics for high flight performance. It can also generate aggressive motion by choosing different motion modals to enables it to fly in dense environments with extended dynamic feasibility.
-
Overall Design and Control of Coaxial Tilt Rotor VTOL UAV
Beijing University of Aeronautics and Astronautics, Beijing, China (Sep 2016 - Sep 2017)
Supervisor: Prof. Weijun Wang
- Funded by National Training Program for Innovation and Entrepreneurship with $60,000
- Won the First Prize of 15th National Challenge Cup (1st author, Top 0.1%, highest Sci-Tech competition for students in China)
Abstract:
VTOL(Vertical Take-off and Landing) UAV is an ideal fusion of fixed-wing UAV and multi-rotor UAV, combining the capability of taking off vertically and high flight enduration. However, the smoothness and stability during the transition have been a critical problem, especially in extreme environments such as high wind disturbance. We address this problem by proposing an adaptive control strategy, which couples the power and steering system with the transition state and airspeed, which enables the vehicle to execute smooth transitions. Iterative learning control is also applied, endowing the vehicle capability to adapt to environments with constant disturbance.
-
Overall Design and Embedded Development of a Quadrotor-Quadruped Robot
Beijing University of Aeronautics and Astronautics, Beijing, China (Sep 2015 - May 2016)
Supervisor: Prof. Weijun Wang
- Funded by Bee Training Program with $ 1,000
- Invented a quadrotor-quadruped robot system which could operate on the ground, fly and grasp in the air
- Won the Second Prize in the 26th Feng Ru Cup Competition of Academic and Technological Works
Abstract:
Based on a single-chip computer and a flight control compound controller, we develop a quadrotor quadruped robot. After rationally designing the overall structure, power, and control system of the robot, the robot inherited the good flight performance of the quadrotor. On the other hand, the robot can move over obstacles on the ground, take off and land on irregular planes. The coupling design of the quadruped and quadrotor fuses the advantages of the two robots and endows them richer practical functions, such as the capability to grasp in the air and climbing stairs on the ground.
-
Overall Design and Control of Multirotors Based on Matlab From Scratch
Beijing University of Aeronautics and Astronautics, Beijing, China (May 2018 - July 2018)
Supervisor: Prof. Quan Quan
- Established the kinetic and dynamic model of an eight-rotor UAV, based on quaternion.
- Established the control system with a dual-loop control structure, with 4 PID cascade controllers.
- Established a Kalman Filter for sensor fusion to estimate the position and velocity.
- Developed a trajectory-planning and decision-making algorithm for a crop-protect mission.